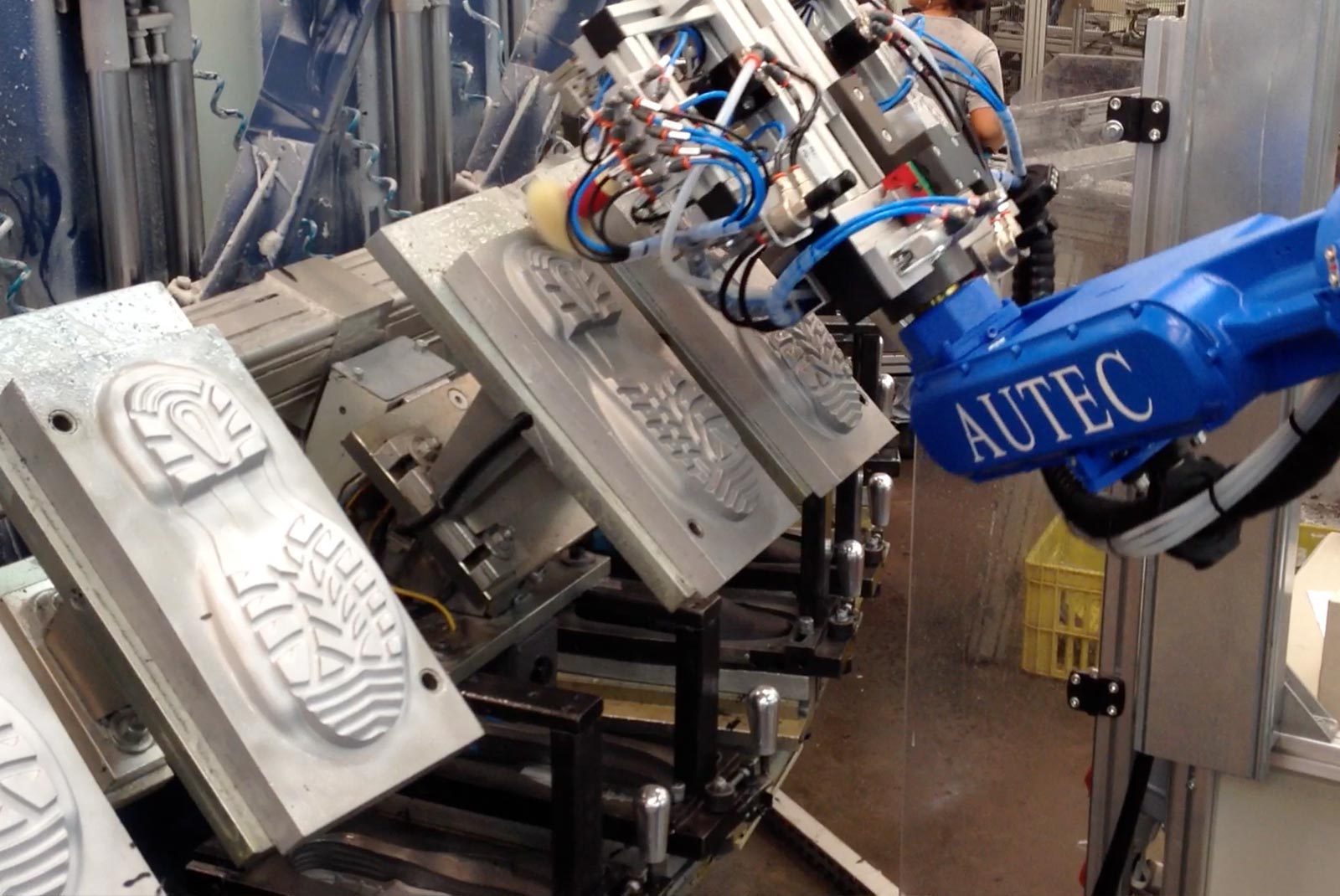
Release agent application

Through the 6-axis robot, equipped with spray guns and a tool with a rotating brush, it is possible to reach all the parts of the molds, even the undercuts, which are difficult to be reached with a manipulator.
Through the guns all types of release agents on the market (water base, solvent base and wax base) can be sprayed in an adequate quantity and in the right directions; the brush helps this function and allows to distribute the silicon inside the molds while removing the excesses.
Advantages
- Possibility of using release agents with a high percentage of concentrate;
- Reduction of the consumption of release agent;
- Possibility of operator elimination;
- Significant reduction of defects and scraps;
- More time between one cleaning of the molds and the other one;
- Possibility of making comparisons between different suppliers of release agents as the application does not depend on the skill of the operator;
- Significant reduction in pollution.
In detail
According to our philosophy, the operator has not to use the robot teach pendant to program its route. The programming is made immediate and intuitive through a digitizing station where by positioning the mold it is possible to acquire all its geometric data in order to program the robot. The path of the robot, for that specific mold, is processed and stored in a PC.
This operation should be performed before putting the mold into production so that the mold programming operation is faster for the operator when the mold goes into production.
Through the use of an inclination sensor it is possible to have the automatic regulation of the robot cycle on the basis of the mold holder plate inclination.
As an option we offer online monitoring of silicone consumption through the use of a load cell. In this way we can:
- Inform the operator when the silicone falls below a certain value, so that he can fill the container;
- Inform when the average consumption of silicone is not in line with the standard one, allowing to intercept potential problems (occlusion of a gun, lack of pressure), and to have the process under control.
Autec in numbers
Before our robot
7-8 grams/pair
average consumption
With our robot
1 gram/pair
average consumption
Average saving
21 Kg/day=5 T/year
assuming 3500 pair/day